слайд 1

Уважаемые коллеги! Вашему вниманию предлагается доклад на тему: «Исследование навигационной системы автоматического управления движением».
Dear Colleagues, I offer you a report on the topic: "Investigation of the navigation system, automatic traffic control".
စာဖတ္ ပရိတ္သက္အေပါင္းအားလံုး ခင္ဗ်ား…..။ ယခု က်ေနာ္ အစီရင္ခံ ရွင္းလင္းျပသမည္႔ အေၾကာင္းအရာ ေခါင္းစဥ္မွာ ယာဥ္တစ္စီး(သို႔) ေရြ႕လွ်ားေနေသာ အရာဝတၳဳတစ္ခုအား အလိုအေလွ်ာက္ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းသည္႔ စနစ္အား ေလ႔လာသုေသသန ျပဳလုပ္ျခင္း ျဖစ္သည္္။
слайд 2

В начале доклада представлены типы навигационных систем автоматического управления движением объектов. Существуют 6 типов навигационных систем:
1. Автомобильная навигационная система
2. Инерциальная навигационная система
3. Робототехническая карта
4. Дистанционное управление подводными средствами
5. Глобальная система позиционирования и
6. Антенная навигационная система
Firstly! The report presents the types of navigation systems of automatic traffic control facilities. There are 6 types of navigation systems.
1. Automotive navigation system
2. Inertial navigation system
3. Robotic map
4. Remote management of underwater resources
5. Global positioning system and
6. Antenna navigation system
ပထမဆံုး အေနျဖင္႔ အလိုေလွ်ာက္ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္ အမ်ိဳးအစား ေတြကို တင္ျပ ပါမည္။ အလိုေလွ်ာက္ ပဲ႔ထိန္း လမ္းေၾကာင္းျပစနစ္ စုစုေပါင္း ၆ မ်ိဳး ရွိသည္။
၁။ ေမာ္ေတာ္ကားႏွင္႔ သက္ဆိုင္ေသာ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္။
၂။ ေျဖးညင္းစြာျဖင္႔ ေရြ႕လွ်ားမႈ အေပၚတြင္ မူတည္ၿပီး လမ္းေၾကာင္းျပ ပဲ႔ထိန္းေသာ စနစ္။ (အီနားရွား ဂုဏ္သတၱိကုိ အေျခခံသည္)
၃။ ရိုေဘာ႔ ေျမပံု လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္။
၄။ ေရေအာက္ပိုင္းရွိ ေဝးလံ စြန္ဖ်ားေဒသမ်ားကို စီမံကြပ္ကဲေသာ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္။
၅။ ကမာၻ႔ေနရာျပစနစ္ ႏွင္႔။
၆။ အန္တင္နာမ်ားကို အသံုးျပဳေသာ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္ တို႔ ျဖစ္သည္။
слайд 3

На этом слайде показаны первые 4 типа.
1. Автомобильная навигационная система является спутниковой навигационной системой. Она предназначена для использования в автомобилях. Автомобильные навигационные системы используют информацию, поступающую со спутников.
2. Инерциальной навигационной системой является навигационная помощь, которая постоянно использует компьютер и датчики движения. В этой системе не используется спутник и в зависимости от скорости движения управляемых объектов нужно произвести вычисления, чтобы узнать их расположение.
3. Робототехнической картой называется система управления роботами. При управлении роботами используются антенны или другие подобные устройства для получения и отправления сигналов. Робототехническая карта связана с картографией. Её задача состоит в том, чтобы иметь возможность построить карту или план и локализовать себя в нём.
4. дистанционное управление подводными средствами называется управление объектами, выпущенными в воду, и которыми можно управлять в зависимости от длины кабелей. Эту систему также можно применять на земле. Подводные производственные системы могут варьироваться по сложности от одного спутника до бесконечности. И с линия связи соединены с стационарную платформу.
This slide shows the first 4 type.
1.Аutomotive navigation system is a satellite navigation system designed for using in automobiles. It typically uses a GPS navigation device to acquire position data to locate the user on a road in the unit's map database.
2.An Inertial Navigation System (INS) is a navigation aid that uses a computer and motion sensors (accelerometers) to continuously calculate via dead reckoning the position, orientation, and velocity (direction and speed of movement) of a moving object without the need for external references.
3. This is the robots management system. To manage the robots, the antenna or other similar devices are required to be used for receiving and sending signals. Robotic map is associated with cartography. For this system the map or proposed plans which are used by the robot are required to design precisely. In this system the movement or performance of the robot is limited depends on the map or position. It’s also depends on the function of the robot.
4. Remote-controlled underwater vehicle is the management of released into the water, and it can be controlled depending on the length of the cables. This system can also be applied on the ground.
ယခု slide တြင္ ပထမ (၄) မ်ိဳးအေၾကာင္းကို ရွင္းလင္းျပသထားသည္
၁။ ေမာ္ေတာ္ကားႏွင္႔ သက္ဆိုင္ေသာ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္ ဆိုသည္မွာ အဓိကအားျဖင္႔ ကားမ်ားအတြက္ အသံုးျပဳေသာ ၿဂိဳဟ္တုမွ လမ္းေၾကာင္းျပေပးတဲ႔ စနစ္ျဖစ္သည္…။ ဂ်ီပီအက္စ္ မွတဆင္႔ ကား၏တည္ေနရာကို ရွာေဖြၿပီး ၎တြင္ ေဖာ္ျပထားသည္႔ လမ္းေၾကာင္းေျမပံုအတိုင္း ပဲ႔ထိန္းေမာင္ႏွင္သည္႔ စနစ္ျဖစ္သည္။
၂။ ေျဖးညင္းစြာျဖင္႔ ေရြ႕လွ်ားမႈ အေပၚတြင္ မူတည္ၿပီး လမ္းေၾကာင္းျပ ပဲ႔ထိန္းေသာ စနစ္ ဆိုသည္မွာ ကြန္ပ်ဴတာ ၏ အကူအညီ တစ္ခု တည္းကိုသာ မွီခုိ၍ အျခား ျပင္ပမည္သည္႔ အရာကိုမွ မမွီခိုပဲ အရာဝတၳဳ၏တည္ေနရာ၊ ပက္ဝန္းက်င္အေနအထား ႏွင္႔ ေရြ႕လွ်ားမႈ အရွိန္တို႔ျဖင္႔သာ စဥ္ဆက္မပ်က္ တြက္ခ်က္ၿပီး လမ္းေၾကာင္းျပ ပဲ႔ထိန္းေသာ စနစ္ျဖစ္သည္။
၃။ ရိုေဘာ႔ ေျမပံု လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္ ဆိုသည္မွာ antenna (သို႔မဟုတ္ အျခားအခ်က္ျပစနစ္ မွတဆင္႔) ေျမပံုဆြဲသက္မွတ္ကာ စက္ရုပ္၊ သို႔မဟုတ္ လႈပ္ရွားေနေသာ ယာဥ္ကို ထိန္းခ်ဳပ္ သည္႔စနစ္ျဖစ္သည္။ အဓိကအားျဖင္႔ ေျမပံုညြန္း အတိအက်ျဖင္႔ ဆက္သြယ္မႈ စနစ္လိုအပ္ပါတယ္။ ၎အတြက္ ရိုေဘာ႔ စနစ္ အသံုးျပဳမည္႔ ပက္ဝန္းက်င္တစ္ခု၏ တိက်ေသာ ေျမပံုညြန္း သို႔မဟုတ္ ႀကိဳတင္ စီစဥ္အကြက္ခ်မႈ ထားရွိရမည္။ ထို႔ေနာက္တြင္ စက္ရုပ္၏ လႈပ္ရွားသြားလာမႈကို control လုပ္ျခင္း ျဖစ္သည္။ ဤစနစ္တြင္ ေျမပံုေပၚတြင္ မူတည္၍ စက္ရုပ္၏ လုပ္ပိုင္ခြင္႔ အနည္း၊ အမ်ား ကြားျခားသည္။ စက္ရုပ္တြင္ပါ၀င္ေသာ function ေပၚတြင္လည္း မူတည္သည္။
၄။ ေရေအာက္ပိုင္းရွိ ေဝးလံ စြန္ဖ်ားေဒသမ်ားကို စီမံကြပ္ကဲေသာ လမ္းေၾကာင္းျပ ပဲ႔ထိန္းစနစ္ ဆိုသည္မွာ ရွည္လွ်ားေသာ ေကဘယ္ႀကိဳးမ်ားကို အသံုးျပဳ၍ ေရနက္ပိုင္းသို႔ ယာဥ္ငယ္မ်ားေစလြတ္ရာတြင္ ပဲ႔ထိန္းသည္႔ စနစ္ျဖစ္သည္။ အထက္ပါ စနစ္မ်ားတြင္ ႀကိဳးမဲ႔ စနစ္မ်ားကို အသံုးျပဳခဲ႔ေသာ္လည္း ဤစနစ္မွာ ေရေအာက္၏ signal လိႈင္းမ်ား၏ ေပးပို႔မႈ၊ လက္ခံမႈ မ်ား ၾကားခံေရ မ်ားၾကားတြင္ ထိန္းခ်ဳပ္ရန္ ခက္ခဲေသာ္ေၾကာင္႔ ေကဘယ္မ်ားကို အသံုးမ်ားျခင္းျဖစ္သည္။ ကုန္းေပၚရွိ ေျမအေနအထား က်ယ္ျပန္႔ေသာ ေနရာမ်ားတြင္လည္း ဤစနစ္ကို အသံုးျပဳနိုင္သည္။
слайд 4

На этом слайде представлены 2 главных типа систем.
5. Глобальная система позиционирования представляет собой созвездие из 24 хорошо интервал, что орбита спутников Земли 11.000 мулов и сделать его возможным для людей с наземными приемниками для определения их географического местоположения.
6. Антенной навигационой системой называется система управления объектами. При применении этой системы обеспечивается определение места положения движущихся объектов (например автомобилей) находящимися в зоне действия системы. Вместо спутника для отправления и получения сигналов используются четыре антенны. Место расположения антенн выбирается из соображений обеспечения зон пересечения действия антенн, с тем чтобы обеспечивался качественный прием передаваемых сигналов и расположение антенн в пространстве с учетом карты местности.
This slide is submitted two main types of systems.
5. The Global Positioning System is a constellation of 24 well-spaced satellites that orbit 11.000 miles far away from the earth and indicate the geographic location of the people on the world exactly.
6. Antenna navigation system is the control system of objects in the application of this system which provides a place the situation of moving objects in the area of the system. Four antennas can be used instead of using the satellite to send and receive signals. To determine the precise location of an object which is located within the zone of the antennas, the crossing points of the signal which are transmitted from these antennas are needed to measure exactly.
ဤ slide တြင္ navigation system တစ္ခုလံုး၏ အေရးအႀကီးဆံုး system ႏွစ္ခုကို ေဖာ္ျပထားသည္။
၅။ ကမာၻ႔ေနရာျပ စနစ္ (ဂ်ီပီအက္စ္စနစ္) ဆိုသည္မွာ အထူးစီမံထားေသာ ဂ်ီပီအက္စ္ ၿဂိဳဟ္တု ၂၄ လံုးကို ကမာၻေျမျပင္မွ မိုင္ေပါင္း ၁ ေသာင္း ၁ ေထာင္ေက်ာ္မွ လည္႔ပက္ေစၿပီး ကမာၻ႔ေျမျပင္ေပၚရွိ လူတစ္ဦး၏ လက္တေလာ တည္ရွိေနေသာ ေနရာကို တိတိက်က်ေဖာ္ျပေပးေသာ စနစ္ျဖစ္သည္။
၆။ Antenna အသံုးျပဳ၍ လမ္းျပ ပဲ႔ထိန္းသည္႔ စနစ္ ဆိုသည္မွာ ေနရာအကန္႔အသက္တစ္ခု အတြင္းရွိ လႈပ္ရွားေနေသာ အရာဝတၳဳတစ္ခုခုကို အန္တင္နာမ်ားကို အသံုးျပဳ၍ ထိန္းကြပ္ရေသာ စနစ္ပင္ျဖစ္သည္။ GPS စနစ္ကဲ႔သို႔ အလုပ္ လုပ္ေဆာင္မည္ျဖစ္ၿပီး သတင္းအခ်က္အလက္မ်ားကို ေပးပို႔ရန္ႏွင္႔ လက္ခံရန္ အတြက္ ၿဂိဳဟ္တုမ်ားကိုယ္စား Antenna မ်ားကို အသံုးျပဳျခင္းျဖစ္သည္။
слайд 5

На данном слайде показано сравнение двух систем. В глобальной системе позиционирования используются 24 спутника. В антенной навигационной системе используются 4 антенны.
This slide shows a comparison of two systems: the Global Positioning System (GPS) and Aerial Navigation System (ANS). In the above figure, 24 satellites are used for GPS and 4 antennas are used for ANS.
ယခု ျပသထားသည္မွာ ဂ်ီပီအက္စ္ စႏွစ္ ႏွင္႔ အန္တင္နာ ျဖင္႔ လမ္းျပပဲ႔ကိုင္ စနစ္ ႏွစ္ခု ကို ႏိႈင္းယွဥ္ထားမႈ ျဖစ္သည္။ ပံုတြင္ ျပထားသည္႔အတိုင္းပင္ ဂ်ီပီအက္စ္ စနစ္တြင္ ၿဂိဳဟ္တု ၂၄ လံုးကို အသံုးျပဳ၍ အန္တင္နာ လမ္းျပစနစ္တြင္ အန္တင္နာ ၄ ခု ကို အသံုးျပဳထားသည္။
слайд 6

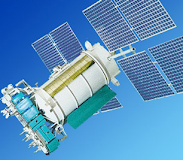
Здесь вы видите GPS спутник глобальнoй системы позиционирования и GSM антенну антенной навигационнoй системы.
Here you can see GPS satellite of Global Positioning System and GSM antenna of Antenna Navigation System.
ယခု ျမင္ေတြ႔ရသည္မွာ ကမာၻ႔ေနရာျပစနစ္တြင္ အသံုးျပဳသည္႔ ဂ်ီပီအက္စ္ ၿဂိဳဟ္တုႀကီးႏွင္႔ အန္တင္နာ လမ္းေၾကာင္းျပ စနစ္တြင္ အသံုးျပဳသည္႔ ဂ်ီအက္စ္အမ္ အန္တင္နာ တို႔ ကို ႏိႈင္းယွဥ္ ျပသထားျခင္းျဖစ္သည္။
слайд 7

На этом слайде представлено вращение Земли вокруг своей оси и вращение 24 спутников вокруг Земли. Здесь же показано, что любая точка Земли может получать сигналы от всех спутников. И показаны зоны действия антенн, которые похожи на соты улья. Высота атенны и длина сигнала зависят от формы Земли.
This slide presents the rotation of the 24 satellites around the earth which rotates around its axis. The above figure shows that a point on the world can receive the signal from how many satellites at one time. The antennas are built like the cell hive of the bee. The height of the antenna and the length of the signal depend on the shape of the determinable place on the earth.
ဤ slide တြင္ ယခု ေဖာ္ျပထားသည္မွာ မိမိဝင္ရိုးေပၚတြင္ မိမိဘာသာ လည္႔ပတ္ေနေသာ ကမာၻႀကီးကို ဂ်ီပီအက္စ္ ၿဂိဳဟ္တုႀကီး ၂၄ လံုးက လည္႔ပက္ေနျခင္းျဖစ္သည္။ ေဖာ္ျပထားသည္မွာ ကမာၻေပၚရွိ ေနရာ တစ္ခု တြင္ တစ္ခ်ိန္တည္း၌ ၿဂိဳဟ္တု အေရတြက္ မည္မွ် က ပို႔လႊတ္ေသာ signal ကို ရရွိနိုင္ေၾကာင္း ျပသ ထားျခင္း ျဖစ္သည္။ ေနာက္တစ္ခု မွာ ANS စနစ္တြင္ အန္တင္နာမ်ားကို ပ်ားအံုမွ ပ်ားသလက္မ်ားကဲ႔သို႔ စုိက္ထူမည္ျဖစ္ၿပီး အန္တင္နာ၏ အျမင္႔ႏွင္႔ signal လိႈင္းမ်ား၏ ရွည္လွ်ားမႈမွာ အသံုးျပဳရန္ သက္မွတ္ထားေသာ ေနရာေဒသရွိ ေျမျပင္အေျခအေန ေပၚတြင္ မွီခို ေနမည္ျဖစ္သည္။
слайд 8

На данном слайде даётся определение местоположения. Мы сузили сектор поиска до пересечения двух окружностей. Остается получить информацию о третьем спутнике и, таким образом, мы получаем точные координаты приемника, который находится на пересечении трех окружностей. Антенная навигационная система работает так же.
This slide shows how to define the location of an object. At first we need to determine the intersection of two circles. Then we got two possible point of the location. For the final decision we need to obtain information from the third satellite, and thus we get the exact coordinates of the receiver, which is located at the intersection of three circles. Antenna navigation system works the same way like this.
ဤ slide တြင္ တည္ေနရာရွာေဖြမႈကို ေဖာ္ျပထားသည္။ ပထမဆံုးအေနျဖင္႔ စက္ဝိုင္းႏွစ္ခု၏ ဆံုမွတ္ႏွစ္ခုကို ကၽြႏ္ုပ္တို႔ ရွာေဖြရမည္။ ထို႔ေနာက္ က်န္ရွိေသာ အဆံုးအျဖက္အတြက္ တတိယစက္ဝိုင္းမွ ရရွိမည္႔ အခ်က္အလက္ကို ရယူရမည္။ ထို႔ေနာက္ ဂ်ီပီအက္စ္ လက္ခံ၍ ေျမပံုညြန္းကို တိတိက်က် ထုတ္ေပးနိုင္မည္ျဖစ္သည္။ ယခု စက္ဝိုင္း သံုးခု ၏ ဆံုမွတ္မွာ ကၽြႏု္ပ္တို႔ လိုအပ္ေနေသာ ေနရာပင္ျဖစ္သည္။ ANS စစနစ္တြင္လည္း ဤသို႔ပင္ လုပ္ေဆာင္သြားမည္ျဖစ္သည္။
слайд 9

На слайде показаны GPS спутник и GPS приёмник, GSM антенна и GSM-тракер.
In the above slide you can see the GPS satellite and GPS receiver, GSM antenna and GSM-tracker.
ယခုျမင္ေတြ႔ရတာကေတာ႔ ဂ်ီပီအက္စ္ ၿဂိဳဟ္တုႏွင္႔ ဂ်ီပီအက္စ္ (လက္ခံပစၥည္း)။ ဂ်ီအက္စ္အမ္ အန္တင္နာႏွင္႔ ဂ်ီအက္စ္အမ္ ထရစ္ကာ ျဖစ္သည္။
слайд 10

На слайде представлен модуль GSM0107 – это один из компонентов GSM / GPRS системы. На слайде приведены его характеристики.
The figure shown in the above slide is GSM modal GSM0107. This is one of the components of GSM / GPRS systems.
ယခုျမင္ေတြ႔ရသည္မွာ ဂ်ီအက္စ္အမ္ ေမာ္ဒယ္ GSM0107 ျဖစ္သည္။ ၎မွာ GSM / GPRS အမ်ိဳးအစား မ်ားထဲမွ တစ္ခု ျဖစ္သည္။
слайд 11

На данном слайде представлена система нахождения (определения) места объектов. Антенна, изменение частоты, аналого-цифровое преобразовачель (АЦП), слежение, обработка сигнала, определения местоположения, и местоположение.
This slide is presented to find a system of objects. At first the antenna » changing the frequency » converting analog to digital (ADC) » tracking » finding out the location and determining the position.
ယခု ျမင္ေတြ႔ ရသည္မွာ တည္ေနရာ ရွာေဖြမႈ ဖြဲ႔စည္းတည္ေဆာက္ပံု ျဖစ္သည္။ ပထမဆံုး အန္တင္နာ၊ ထို႔ေနာက္ ႀကိမ္ႏံႈးကို ေျပာင္းလဲမႈ၊ ေနာက္ အန္နာေလာ႔ မွ ဒစ္ဂ်စ္တယ္ သို႔ ေျပာင္းလဲမႈ၊ ေျခရာခံျခင္း၊ တည္ေနရာရွာေဖြျခင္း ႏွင္႔ တည္ေနရာ တို႔ ပါဝင္သည္။
слайд 12

Вот вы видите карту Янгона и карту Мьянмы. Янгон – это вторая столица Мьянмы.
Here you can see a map of Yangon in Myanmar. Yangon is the second capital city of Myanmar.
ယခု ေတြ႔ျမင္ရသည္မွာ ရန္ကုန္ၿမိဳ႕ေျမပံုႏွင္႔ ျမန္မာနိုင္ငံေျမပံုျဖစ္သည္။ ရန္ကုန္မွာ ျမန္မာနိုင္ငံ၏ ဒုတိယ ၿမိဳ႕ေတာ္ျဖစ္သည္။
слайд 13

Площадь Янгона составляет почти 350 кв.км. В этом месте применяем антенную навигационную систему. Использованная площадь Ягона будет равна 225кв.км.
The area of Yangon is almost 350 sq km wide and we start trying to implement the navigation system antenna in this place. The used space for the system of Yangon will be 225 sq km.
ရန္ကုန္တစ္ခု လံုးမွာ ခန္႔မွန္းအားျဖင္႔ ၃၅၀ စတုရန္းကီလိုမီတာ က်ယ္ဝန္းၿပီး အန္တင္နာ စနစ္ကို ရန္ကုန္ၿမိဳ႕တြင္ စမ္းသပ္ အသံုးျပဳမည္ျဖစ္သည္။ အသံုးျပဳမည္႔ အက်ယ္အဝန္းမွာ၂၂၅ စတုရန္း ကီလိုမီတာ ျဖစ္သည္။
слайд 14

На слайде показан Алгоритм обработки сигналов антенны.
On the slide shows the algorithm of the antenna’s signal processing.
ယခုျမင္ေတြ႔ရသည္မွာ အန္တင္နာ စနစ္အတြက္ လုပ္ေဆာင္မႈ တြင္ လိုက္နာရမည္႔ စည္းကမ္း၊ လုပ္နည္း အဆင္႔ဆင္႔ ျဖစ္သည္။
слайд 15

Здесь вы видите формулы для обработки сигналов. E - это мощность, k - это константа и R - это радиус.
Here you see the formula for signal processing. E stands for power k stands for a constant and R is the radius.
ဤတြင္ ေဖာ္ျပထားသည္မွာ လုပ္ေဆာင္ခ်ိန္တြင္ အသံုးျပဳမည္႔ ေဖာ္ျမဴလာျဖစ္သည္။ E မွာ ပါဝါ၊ k မွာ ကိန္းေသျဖစ္ၿပီး R မွာ အခ်င္းဝတ္ ျဖစ္သည္။
слайд 16

На данном слайде показан пример нахождения местоположения обьекта. Сночало в использованой площади есть 4 GSM антенны. Есть одна машина с GSM тракером в действующей зоне антенн. Как только антенны начинают работать, тракер машины пасилает сигнал к каждой антенне. Тогда самая близкая антенна измерает мощность полученого сигнала, при помощи мощности сигнала она определяет его длину формулами. Потом она опрабляет эту длину к устройству, решающему координаты объекта. Если длина равна 3 км, то определяется круги по радису 3 км. Тогда мы можем можно сказать, что объект есть в каком-нибудь месте периметра круга.
This slide shows an example of finding a location of the object. At first the space for using the system has 4 GSM antennas. There is a car with GSM tracker in the current zone antennas. As soon as the antenna starts, tracker of car send signal to each antenna. Then the nearest antenna receives the power of signal and determines the length with formulas, using the power of the signal. Then the antenna sends the result to the device which calculates the location of the object. If the measurement of the distance is 3km, we can draw a circle which center on this antenna with the radius 3km. Then we can say that the object is existed in any one place on the boundary line of the circle.
ယခု စလိုက္တြင္ အရာဝတၳဳ၏ တိက်ေသာတည္ေနရာ တစ္ခု ရရွိရန္အတြက္ အလုပ္လုပ္ေဆာင္ပံုကို ဥပမာျပထားသည္။ ပထမဦးဆံုး ANS စနစ္ကို အသံုးျပဳမည္႔ ေျမေနရာတြင္ GSM antenna ၄ ခု ကို တည္ေဆာက္ရမည္။ ထို႔ေနာက္ ထိုနယ္ေျမတြင္ GSM Tracker တပ္ဆင္ထားေသာ ကား တစ္စီး ရွိမည္ ဆိုပါစို႔။ အလုပ္စတင္ လုပ္ေဆာင္သည္ႏွင္႔ Tracker သည္ ရွိသမွ် Antenna မ်ားအားလံုးဆီသို႔ Signal ပို႔လႊတ္လိုက္မည္ျဖစ္သည္။ Antenna မ်ားအားလံုးကလည္း Tracker ကို အသည္းအသန္ လိုက္ရွာၾကမည္။ ထို႔ေနာက္ Signal ရရွိပါက ျမင္႔ဆံုး Power ရရွိေသာ Antenna က အရင္ဆံုး Signal ၏ Power ကိုတိုင္းတာမည္ ျဖစ္သည္။ ထို႔ေနာက္ ရရွိေသာပါဝါမွ တဆင္႔ အကြာအေဝးကို ေဖာ္ျမဳလာအတိုင္း တြက္ခ်က္မည္ျဖစ္သည္။ ထို႔ ေနာက္ ေျမပံုညြန္းတြက္ခ်က္ေရး ကိရိယာ သို႔ ေပးပို႔မည္။ အကယ္၍ အကြာအေဝးတိုင္းတာမႈ အရ ၃ ကီလိုမီတာ တြက္ခ်က္လို႔ ရသည္စို႔၊ ထိုအန္တင္နာ ကို ဗဟိုျပဳ၍ အခ်င္းဝတ္ ၃ ကီလိုမီတာ ရွိေသာ စက္ဝိုင္းတစ္ခုကို ဝိုင္းၾကည္႔နိုင္သည္။ ဤအခိုက္အတန္႔မွာပင္ စက္ဝိုင္း၏ အဝန္းပိုင္း၏ တစ္ေနရာရာမွာ က်ိန္းေသ ကား ေရာက္ေနေၾကာင္း ကၽြႏု္ပ္တို႔ သိရွိနိုင္သည္။
Вторая антернна повторяет самую работу как первая антенн и получается второй круг. И так как на слайде показано мы получили два места пересчения кругов и може точно сказать что объект есть на одном месте пересчения из двух. Поэтому третья антенна тоже повторяет процедуру работы как предыдущие антенны, и получается зелённый круг. Таким образом мы можем точно сказать расположение обьектов.
Second antenna also works as the first antenna and get a second circle. As shown in the figure above we can get two intersection points of the two circles. And we can accurately say that the object must exist in one of this two intersection points. And also the third antenna repeats the procedure like the previous antenna, and it produces the green circle. Thus we can get location of objects exactly at the intersection point of these three circles.
ဒုတိယေျမာက္ အန္တင္နာမွာလည္း ပထမ Antenna ကဲ႔သို႔ပင္ အလုပ္လုပ္ေဆာင္ၿပီး ဒုတိယေျမာက္ စက္ဝိုင္း ကို ရရွိမည္။ ထိုအခ်ိန္တြင္ ပံုတြင္ျပထားသည္႔အတိုင္း ကၽြႏု္ပ္တို႔ စက္ဝိုင္းႏွစ္ခု ၏ ဆံုမွတ္ ၂ ခု ကို ရရွိမည္ျဖစ္ၿပီး ထို ဆံုမွတ္ႏွစ္ခု ထဲမွ တစ္ခုတြင္ ကၽြႏ္ုပ္တို႔ ရွာေဖြေနေသာ အရာဝတၳဳ ေရာက္ရွိေနေၾကာင္း သိနိုင္မည္ ျဖစ္သည္။ ထို႔ေနာက္ တတိယေျမာက္ အန္တင္နာ မွာလည္း ေရွ႕မွ အန္တင္နာမ်ားအတိုင္း ထပ္မံ အလုပ္လုပ္ေဆာင္ ရင္း ပံုတြင္ျပထားသည္႔အတိုင္း အစိမ္းေရာင္ စက္ဝိုင္း ကို ထပ္မံ ရရွိမည္႔။ ဤအေျခအေန တြင္ ရွာေဖြေနေသာ အရာဝတၳဳ၏ တည္ရွိေသာ ေနေရာကို ကၽြန္ႏု္ပ္ တို႔ တိတိက်က် ရရွိမည္ ျဖစ္သည္။
Если в действующей зоне антенн есть высокие здания или такие подобные, сигнал от машины может исчезнуть и сигнал потеряется. При этом антена знает, что длино состовляет 9 км, хотя сигнал отправлен от неудалённого обьекта. Она определяет круг по радиусу 9 км. Когда остальные две антенны работают получаются и 4 места пересечения. И так четвётая антенна повтояет самую работу и получается четвётой круг. На слайде показано мы получили одна места пересчения кругов. И може точно сказать что объект есть.
If in the current zone antennas have high buildings or some obstacles or something like this, the signal from the vehicles may lost and wrongly arrive. In this condition one of the antennas may calculate the length of the signal. Let the antenna calculate the length of the signal as 9 km although the signal is sent from poor object. It defines a range of radius of 9 km. After other two antennas have finished the calculation of the length of the signal then 4 intersection points have been obtained as shown in the figure above. At this time we need to take the assistance from fourth antenna. And so the fourth antenna repeats the procedure and can deliver fourth circle. At this time we got only one intersection point during these 4 circles. And can accurately say that the object is existed at this point.
အကယ္၍ Antenna စက္ကြင္းမိ နယ္ေျမအတြင္းတြင္ ျမင္႔မားေသာ အေဆာက္အဦးမ်ား သို႔ မဟုတ္ အျခားအျခားေသာ အတားအဆီးမ်ား၊ အေႏွာက္အယွက္မ်ား ရွိေနသည္ဆိုပါဆို႔။ Tracker မွ လာေသာ Signal မွာ မွားယြင္းစြာ ေရာက္ရွိလာျခင္းမ်ား (သို႔) ေပ်ာက္ဆံုးျခင္းမ်ား ျဖစ္ေပၚလာနိုင္သည္။ ဤအေျခအေနမ်ိဳးတြင္ အန္တင္နာ မွားယြင္းစြာျဖင္႔ အရာဝတၳဳ၏ အကြာအေဝးကို (၉) ကီလိုမီတာ ဟု တိုင္းတာ ရရွိေကာင္း ရရွိနိုင္လိမ္႔မည္။ ထိုအခ်ိန္မွာပင္ အခ်င္းဝတ္ (၉) ကီလိုမီတာ ရွိေသာ စက္ဝိုင္းတစ္ခု ကို ရရွိေပမည္။ တစ္ခ်ိန္တည္းမွာပင္ ေနာက္ထပ္ Antenna ႏွစ္ခု အလုပ္လုပ္ ၿပီးေသာအခါ ဆံုမွတ္မ်ားမွာ ပံုတြင္ျပထားသည္႔အတိုင္း စုစုေပါင္း ၄ ခု ထိ ရရွိေနလိမ္႔မည္။ ထိုအခါတြင္ ေနာက္ဆံုး စတုတၳေျမာက္ အန္တင္နာမွ ေရွ႕အန္တင္နာမ်ားအတိုင္း အလုပ္လုပ္ၿပီး စတုတၳေျမာက္ စက္ဝိုင္းကို ရရွိေပမည္။ ယခုတစ္ႀကိမ္တြင္ေတာ႔ အမ်ားဆံုး ဆံုမွတ္ တစ္မွတ္တည္းကိုသာ ကၽြႏု္ပ္တို႔ ရရွိေပေတာ႔သည္။ ယခု ျမင္ေတြ႔ရေသာ ဆံုမွတ္သည္ ကၽြႏ္ုပ္တို႔ ရွာေဖြေနေသာ အရာဝတၳဳ၏ တည္ေနရာပင္ျဖစ္သည္။
слайд 17

На данном слайде представлены результаты работы антенной навигационной системы. Таким образом в работе достигнуты следующие результаты:
1. проведен анализ существующих навигационных систем;
2. рассмотрены типы используемых антенн и способов кодирования информации;
3. рассмотрены варианты построения систем обработки и управления информацией о положении объектов управления;
4. проведен анализ существующей элементной базы кодирующих и декодирующих устройств;
5. рассмотрены сравнительные характеристики спутниковых навигационных систем ГЛОНАС и GPS;
6. разработана и предложена антенная навигационная система для Янгона;
7. рассмотрены схемы кодирования информации.
This slide presents the results of the antenna navigation system. Thus in the work achieved the following results:
1. an analysis of existing navigation systems;
2. examined the types of antennas and means of encoding information;
3. consider the options of building systems and information management on the status of governance;
4. analysis of the existing components are encoded and decoding devices;
5. examined the comparative characteristics of satellite navigation systems GLONASS and GPS;
6. develop and antenna navigation system for Yangon;
7. reviewed the coding scheme information.
слайд 18

Место расположения антенн выбирается из соображений обеспечения зон пересечения действия антенн, с тем что бы обеспечивался качественный прием передаваемых сигналов и расположение антенн в пространстве с учетом карты местности. Создание подобных систем имеет особое значение для тех стран, у которых нет спутников, таких как Мьянма. В данной работе рассматривается вариант создания навигационной системы для столицы Мьянмы города Янгона. Предложено расположение системы антенн. Рассматриваются методы модуляции и обработки сигналов, а также структура мобильных приемо-передающих устройств. Использование антенной навигационной системы, применяемой на отдельной территории, позволяет определять расположение объектов более точно. Эта система очень быстро и легко может быть развернута в любой точке мира. Скорость получения и отправления сигналов быстрее чем в других системах. Кроме того система доступна по стоимости.
The location of the antennas is selected for reasons of security zones crossing action antennas, so that would provide quality reception of transmitted signals and the location of antennas in a space with light maps. Creating such systems is of particular importance for those countries which have no satellites, such as Myanmar. In this paper the option of establishing a navigation system for the capital city of Myanmar, Yangon. Proposed location of antennas, Methods of modulation and signal processing as well as the structure of mobile transmission and receiving devices. Using antenna navigation system used on its own territory, allows to determine the location of objects more precisely. This system is very fast and can be easily deployed anywhere in the world. Speed of receiving and sending signals faster than in other systems. In addition the system is available at cost.
слайд 19

Разработанная система имеет следующие преимущества:
• Небольшие затраты на систему
• Возможность использования при отсутствии спутников
• Легкость в применении
• Возможность использования в любой точке мира
• Быстрота работы
• Точность определения места
The system has the following advantages:
• The small cost of the system
• Ability to use in the absence of satellites
• Ease of application
• Ability to use anywhere in the world
• Quickly work
• The accuracy of location
слайд 20

Спосибо за внимание!
Thanks for your attention!











































.jpg)