Base Station မွ ရရွိေသာ Data မ်ားသည္ Coordinates မ်ားကို ပံုေသတြက္ခ်က္ထားျဖင္း ျဖစ္သည္။ ထို႔ေၾကာင့္ လက္ရိွ Coordinates ႏွင့္ တြက္ခ်က္ထားသည့္ ကြာျခားခ်က္မ်ားမွ Correct Value ကို Monitoring လုပ္ကာ ျပန္လည္ တြက္ခ်က္ျခင္းျဖစ္သည္။ Base Staion မ်ားႏွင့္ နီးကပ္ေသာ ေနရာမ်ားတြင္ Observations လုပ္ျခင္းသည္ Station မွာလုပ္တဲ့တိုင္းထြာမႈမ်ားျဖင့္ တူညီေသာေၾကာင့္ တူညီေသာ Errors မ်ားသာ ျဖစ္ေပၚေစသည္။ ၎ Error မ်ားအား Reference Station တြင္ တြက္ခ်က္ထားသည့္ Proofreading Value ကို ေပါင္းထည့္ျခင္းအားျဖင့္ ေလ်ာ့ခ်နိုင္သည္။ ဤ နည္းပညာအား Differential Method GPS (သို႔) DGPS (Differential Global Positioning System) ဟု ေခၚဆိုသည္။ DGPS နည္းပညာကို အသံုးျပဳ၍ ပိုမိုတိက်ေသာ တည္ေနရာ ႏွင့္ တိုင္းထြာမႈကို ရရွိေစနုိင္သည္။
Control Station ေခၚ Base Station ႏွင့္ Mobile Unit မွ GPS Satellite အကူအညီျဖင့္ တည္ေနရာရွာေဖြရာတြင္ Control Station ၏ တည္ေနရာ Coordinates မ်ားအား Correction Value ၏ Magnitude အားျဖင့္ ဆံုးျဖတ္ရယူျပီး Mobile station ကို ေပးပို႔သည္။ ထို႔ေနာက္ Mobile Station မွ Control Station သို႔ ယာဥ္၏ တည္ေနရာ ႏွင့္ အခ်က္အလက္မ်ားအား လႊဲေျပာင္းေပးသည္။ ထို႔ေနာက္ Base Station တြက္ခ်က္အေျဖထုတ္ကာ ေရြ႕လ်ားေနေသာ ယာဥ္ ေပၚ ရွိ Mobile Station ၏ တည္ေနရာအား တိတိက်က် တြက္ခ်က္ေဖာ္ထုတ္ေပးျခင္းျဖစ္သည္။
This paper addresses the problem of mobile robot navigation using artificial potential fields. Many potential field based methodologies are found in the robotics literature, but most of them have problems with spurious local minima, which cause the robot to stop before reaching its target position. Although some free of local minima methodologies are found in the literature, none of them are easy to implement and generalize for complex shaped environments and robots. We propose a perfect analogy between electrostatic field computation and robot path planning. Thus, an easy solution to the problem, which is based on standard finite-element methods, can be applied with generic geometries and can even take into account the robot’s orientation. To demonstrate the elegance of the proposed methodology, several experimental results with actual mobile robots are included.
Эта статья посвящена проблеме мобильной робот-навигации с использованием искусственных потенциальных полей. Многие методологии на основе потенциальные поля можно найти в литературе по робототехники, но большинство из них имеют проблемы с ложных локальных минимумов, которые вызывают чтобы остановить робота, до достижение своей цел. Хотя некоторые методологии местных минимумов можно найти в литературе. Все нх трудно выпольнить и приспо собить для и роботов сложной формы. Мы предлагаем полную аналогию между вычислениом электростатического поля и планированом робота пути. Таким образом, простое решение проблемы, которая основана на стандартных методов конечных элементов, може быть применено с общей геометрии и может даже принять во внимание ориентацию робота. Чтобы продемонстрировать элегантность предлагаемой методологии и приложены несколько экспериментальных результатов с фактическими мобильнымы роботамы включены.
ဤ ျပႆနာကို ေျဖရွင္းရန္ methodologies မ်ားအား survey ျပဳလုပ္ထားျခင္းကို Reference No.(1) တြင္ေတြ.ရိွနိုင္ပါသည္။ မ်ားေသာ ခ်ဥ္းကပ္မႈ.မ်ားသည္ configuration space C (1) သေဘာတရား ေပၚတြင္ အေျခခံသည္။ reference point တခု တပ္ဆင္ထားေသာ ေျမျပင္ညီမ်က္နွာျပင္တြင္ ေရြ.လ်ားေနေသာ robot ကို navigate လုပ္ျခင္းကို စဥ္းစားၾကပါစို႔။ ပံုတြင္ G မွာ robot ေပၚရိွ reference point ျဖစ္သည္။ Robot ၏ configuration q တန္ဖိုးမွာ ( x,y,Ɵ ) ျဖစ္သည္။ ယင္းတြင္ x ႏွင့္ y မွာ G ၏ coordinates မ်ား ျဖစ္ၾကျပီး Ɵ မွာ orientation ျဖစ္သည္။ ဆိုလိုသည္မွာ Cofiguration space C, သည္ robot ၏ ျဖစ္နိုင္ေခ်ရိွေသာ configurations မ်ား၏ အစုျဖစ္သည္။ တခ်ိန္တည္းမွာပင္ robot's trajectory သည္ C ထဲတြင္ရိွေသာ configurations ၏ ဆက္တိုက္ျဖစ္ေပၚေနေသာ sequence တခုျဖစ္သည္။ ထိုသေဘာတရားကို fig (1)တြင္ ျပထားသည္။ အတားအဆီးမ်ားကို robot's configuration space အတြင္းတြင္ မသြားရ နယ္ေျမမ်ား အျဖစ္ ေဖာ္ျပထားသည္။ တိုက္ခိုက္လဲျပိဳမႈ.ကင္းေသာ configuration space ကိုမူ free configuration space F [1] အျဖစ္ေဖာ္ျပထားသည္။ Configurtion space အတြင္း navigation ျပႆနာေျဖရွင္းျခင္း ၏ အဓိက အားသာခ်က္မွာ ကုိ အေနျဖင့္ သတ္မွတ္ စဥ္းစားနိုင္ျပီး ၎၏ ပံုသ႑ာန္ကိုမူ space တည္ေဆာက္စဥ္အတြင္းသာ စဥ္းစားဆံုးျဖတ္သည္။ Robot's configuration space တြက္ခ်က္ရာမႈ.အတြက္ Minkowski sums သံုး၍ အတားအဆီးမ်ားအား robot အရြယ္အစားအတိုင္း ၾကီးမားေအာင္ ျပဳလုပ္ျခင္းကို အသံုးျပဳနိုင္သည္ ။
THE mobile robot navigation problem has attracted attention of many researchers along the years and many methodologies have been proposed. Considering a static environment, where the shape and position of the obstacles are known (by means of a map, for example), the navigation problem can be stated as follows:
“Given a generic shaped robot in an environment with generic shaped obstacles, drive the robot to a target position in this en-vironment by avoiding collisions with the obstacles.”
A wide survey on methodologies to solve the problem stated above can be found in [1]. Most of the approaches are based on the concept of configuration space [1]. Consider a mobile robot navigating in a planar surface, and a reference point which is fixed on the robot. The robot’s configuration q= (x, y, Ɵ) is composed by the x and y coordinates of G and the robot’s orientation Ɵ. Then, by definition, the configuration space, C , is the set of all possible configurations of the robot, while the robot’s trajectory is a continuous sequence of configurations in C. Fig. 1 shows these concepts. Obstacles are represented in the robot’s configuration space as a set of forbidden configurations. The regions of the configuration space free of collisions are referred to as the free configuration space, F [1]. The main advantage of solving the navigation problem in the configuration space is that the robot can be considered as point, since its shape is considered only during the construction of the space. The computation of the robot’s configuration space can be performed by growing the obstacles by the size of the robot using Minkowski Sums [2].
Проблемы мобильный навигации роботов привло внимание многих исследователей на протяжении лет, и были предложены многие методики. Учитывая статические ан-окружения, где известно форма и положение препятствия (с помощью карты, например), навигация проблема может быть сформулирована следующим образом:
"С учетом робота общей форме в среде с общей форме препятствия, диск робота целевой позицию в этом ан-окружения, избегая столкновения с препятствиями".
Широкий обзор методик для решения проблемы указано выше, можно найти в [ 1 ]. Большинство подходов на основе концепции конфигурационного пространства [ 1 ]. Рассмотрим мобильного робота, плавающие в плоской поверхности, а также ссылки точка G который закреплен на роботе. Робота конфигурации состоит q= (x, y, Ɵ) из x и y координаты G и Ɵ - ориентация робота. Тогда, по определению, кон- рацион пространстве, является множество всех возможных конфигураций робота, а робота траектория является непрерывной последовательности конфигураций в. Рис. 1 показаны эти понятия. Препятствия представлены в конфигурации в пространстве робот в виде набора запрещенных конфигураций. Регионах конфигурации пространстве, свободном от столкновения называют свободной конфигурации пространства, [ 1 ]. Основное преимущество решения навигации Проблема в конфигурации пространства является то, что робот может быть рассматриваются как точечные, так как его форма считается только во время строительство пространстве. Вычисление робота конфигурационного пространства может быть выполнена растущей препятствий по размерам робота с использованием Минковского сумм [ 2].
Configuration space ကို တြက္ခ်က္ျပီးေနာက္တြင္ robot ၏ လမ္းေၾကာင္းကို စီမံရမည္ျဖစ္ျပီး ထိုစီမံထားသည့္လမ္းေၾကာင္းအတိုင္း တိတိက်က် သြားနိုင္ရန္ control လုပ္ရမည္ျဖစ္သည္။ ၎တို.အတြက္ လက္ေတြ.လုပ္ေဆာင္မႈ.နည္းလမ္းသည္ artificial potential fields ေပၚတြင္အေျခခံထားသည္ ကို reference No.(3) တြင္ၾကည့္္နိုင္ပါသည္။ ဤ နည္းလမ္းအတြက္ robot's free configuration space F ေပၚတြင္ potential function ဟုေခၚေသာ scalar field Ф (q) ကို သတ္မွတ္ရမည္ျဖစ္သည္။ Potential function ၏ ေျပာင္းျပန္ေဇာက္ေလွ်ာ -ΔФ(q) ကို robot ေပၚတြင္ artificial force တခု အေနျဖင့္ သက္ေရာက္ေစကာ ယင္းမွ ရရိွလာေသာ resultant force ကို robot ထိန္းခ်ဳပ္ရာတြင္ အသံုးျပဳမည္ ျဖစ္သည္။ ဤ နည္းလမ္းတြင္ အေျခခံ အက်ဆံုးအခ်က္တခ်က္မွာ robot သြားလိုရာ ပန္းတိုင္ ( goal ) တြင္ attractive potential နွင့္ အတားအဆီး obstacles မ်ားတြင္ repulsive potential မ်ားကို သတ္မွတ္ထားေပးရန္ျဖစ္သည္။ ထို.ေနာက္ ၎တို.ကို ေပါင္းစည္ေစျခင္းျဖင့္ Ф(q) ကို ရရိွမည္ျဖစ္သည္။ -ΔФ(q) အားျဖင့္ ရရိွထားေသာ integral curves of the vector field သည္ F ေပၚရိွ စမွတ္ အမိ်ဳးမိ်ဳးမွ အဆံုးအမိ်ဳးမိ်ဳးသုိ. သြားရာ လမ္းေၾကာင္းမ်ား ( implicit paths ) ျဖစ္လာသည္။
After computing the configuration space we must plan the robot’s trajectory and then control the robot to follow this trajectory. A practical approach to plan trajectories and control the robot is based on artificial potential fields [3]. In this approach a scalar field Ф (q) , called potential function, is defined over the robot’s free configuration space, F. The negative gradient of the potential function -ΔФ(q) is then treated as an artificial force acting on the robot (represented by its configuration q), and the Resultant force may be used to control the robot. The most basic instance of this approach is to assign an attractive potential to the goal and a repulsive potential to the obstacles and add them together in order to compose Ф(q) . The integral curves of the vector field formed by -ΔФ(q) define implicit paths from every start configuration in to the target configuration.
После вычисления конфигурационного пространства мы должны планировать траектории движения робота, а затем управлять роботом следуя этой траектории траектории. Практический подход к плану траектории и контроля робот на основе искусственных потенциальных полей [ 3 ]. В этом подходе скалярное поле Ф (q) , называемое потенциальной функцей, определяется нада пространств свободной конфигурации робота F . Отрицательный градиент потенциальной функции -ΔФ(q), рассматриваются как искусственная сила действующая на робот (представленая ее конфигураций q), и результирующая сила может быть использована для управления роботом. Основные премер этого подхода состоит в назначении привлекательным потенциалом для цель и отталкивамая потенциалая для препятствий и сложеним их, чтобы составить Ф(q). Интегральных кривых векторного поля -ΔФ(q) образованного определить неявные пути от каждого начинает конфигурации до конец конфигурации.
The location of the antennas is selected for reasons of security zones crossing action antennas, so that would provide quality reception of transmitted signals and the location of antennas in a space with light maps. Creating such systems is of particular importance for those countries which have no satellites, such as Myanmar. In this paper the option of establishing a navigation system for the capital city of Myanmar, Yangon. Proposed location of antennas, Methods of modulation and signal processing as well as the structure of mobile transmission and receiving devices. Using antenna navigation system used on its own territory, allows to determine the location of objects more precisely. This system is very fast and can be easily deployed anywhere in the world. Speed of receiving and sending signals faster than in other systems. In addition the system is available at cost.
Thus in
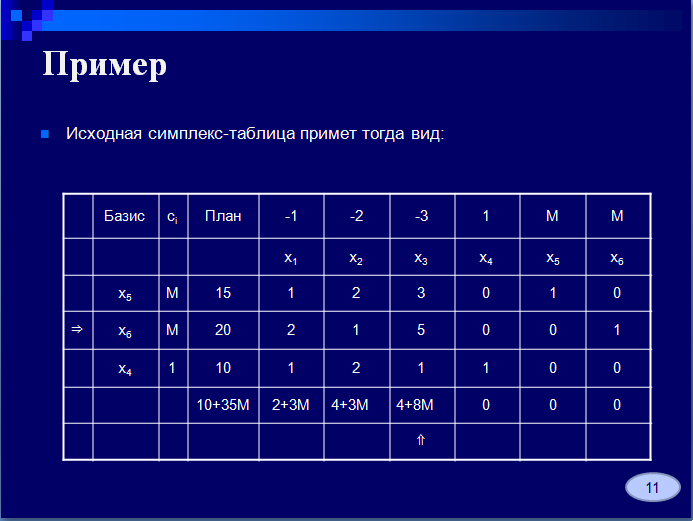
Examines the use cimpleks method for solving problems of navigation;
Consideration of options for the construction of systems for processing and managing information on the status of facilities management;
The possibility of using an antenna system in the absence of satellites;
In addition, the proposed method can solve many problems in navigation, such as coordinate the work of the fleet, the search of the vehicle in case of theft, and many others.











































































.jpg)














{kind=link}